 Unsere Website steht Aufgrund einer technischen Störung nur eingeschränkt zur Verfügung. Dies betrifft auch unseren Download Service Bereich. Wir arbeiten mit hochdruck an der Lösung um bitten um Verständnis.
Unsere Website steht Aufgrund einer technischen Störung nur eingeschränkt zur Verfügung. Dies betrifft auch unseren Download Service Bereich. Wir arbeiten mit hochdruck an der Lösung um bitten um Verständnis.Integrierte magnetische Drehgeber mit Magnetring
Flexibel anpassbare, platzsparende und wartungsfreie Lösung für präzise Winkel- und Positionsmessung in kompakten Antriebssystemen
Integrierte magnetische Drehgeber von Kübler erfassen zuverlässig den Wechsel der Magnetfelder von Nord- und Südpol auf einem Ring, der mit der Antriebswelle verbunden ist. Durch die flexible Auswahl von Auflösung und Magnetring-Geometrie lassen sich die Sensoren optimal an unterschiedliche Antriebe und Anforderungen anpassen. Sie bieten eine wartungsfreie, platzsparende Lösung für kompakte Motoren und sorgen für präzise Winkel- und Positionsmessung, selbst unter anspruchsvollen industriellen Bedingungen
Integrierte magnetische Drehgeber mit Magnetring
Flexibel anpassbare, platzsparende und wartungsfreie Lösung für präzise Winkel- und Positionsmessung in kompakten Antriebssystemen
Integrierte magnetische Drehgeber von Kübler erfassen zuverlässig den Wechsel der Magnetfelder von Nord- und Südpol auf einem Ring, der mit der Antriebswelle verbunden ist. Durch die flexible Auswahl von Auflösung und Magnetring-Geometrie lassen sich die Sensoren optimal an unterschiedliche Antriebe und Anforderungen anpassen. Sie bieten eine wartungsfreie, platzsparende Lösung für kompakte Motoren und sorgen für präzise Winkel- und Positionsmessung, selbst unter anspruchsvollen industriellen Bedingungen
Vorteile
FLEXIBEL
PROGRAMMIERBAR
ROBUST
SCHNELL
Magnetische Sensorik mit Magnetring – Aufbau
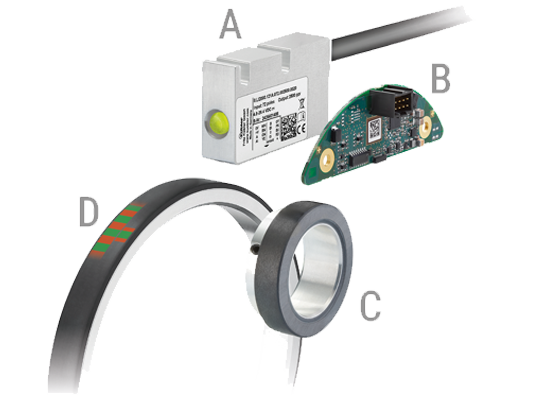
A. Sensorik im IP67 Gehäuse für den Einsatz auch in ungeschützten Bereichen
B. Sensorplatine für die direkte Integration in den Antrieb – Form und Dimensionen individuell anpassbar
C. Magnetringe für unterschiedliche Wellendurchmesser und Befestigungsarten
D. 2 mm oder 5 mm Pollänge der Magnetringe – optional mit Referenzsignal
Varianten Sensorkopf

Komplette Systeme aus Sensorkopf und Magnetring
- Stabiles Sensorkopf-Gehäuse mit Schutzart IP67 für
Integration oder Anbau an die Applikation - Einfache Installation

Voll integrierbare Platinen-Lösung
- Individuell anpassbar
- Minimaler Platzbedarf
Flexible Auswahl von Pollänge und Magnetringen

Für eine hohe Signalgüte
Bei hohen Anforderungen an die Signalgüte sollten die lagerlosen Drehgeber RIM200 mit 2 mm Pollänge oder die programmierbaren lagerlosen Drehgeber RIM2000 eingesetzt werden. Voraussetzung dafür sind gute Lager und ein stabiler Installationsprozess, der einen Luftspalt bis max. 1 mm ermöglicht.

Für Anwendungen mit größerem Luftspalt
Wenn die Applikation einen größeren Luftspalt (bis max. 2 mm) erfordert, kommen die lagerlosen Drehgeber RIM500 mit 5 mm Pollänge zum Einsatz, oder die programmierbaren lagerlosen Drehgeber RIM5000. Bei ebenfalls hoher Signalgüte wird auch hier eine hohe Performance geboten.

Breite Auswahl an Magnetringen
Auch wenn für alle Außendurchmesser eine hohe Auflösung realisiert werden kann, empfiehlt es sich, den größtmöglichen Durchmesser zu wählen.

Verschiedene Montagemöglichkeiten
Zur Montage an die Applikationswelle stehen unterschiedliche Durchmesser und Befestigungsarten zur Verfügung.
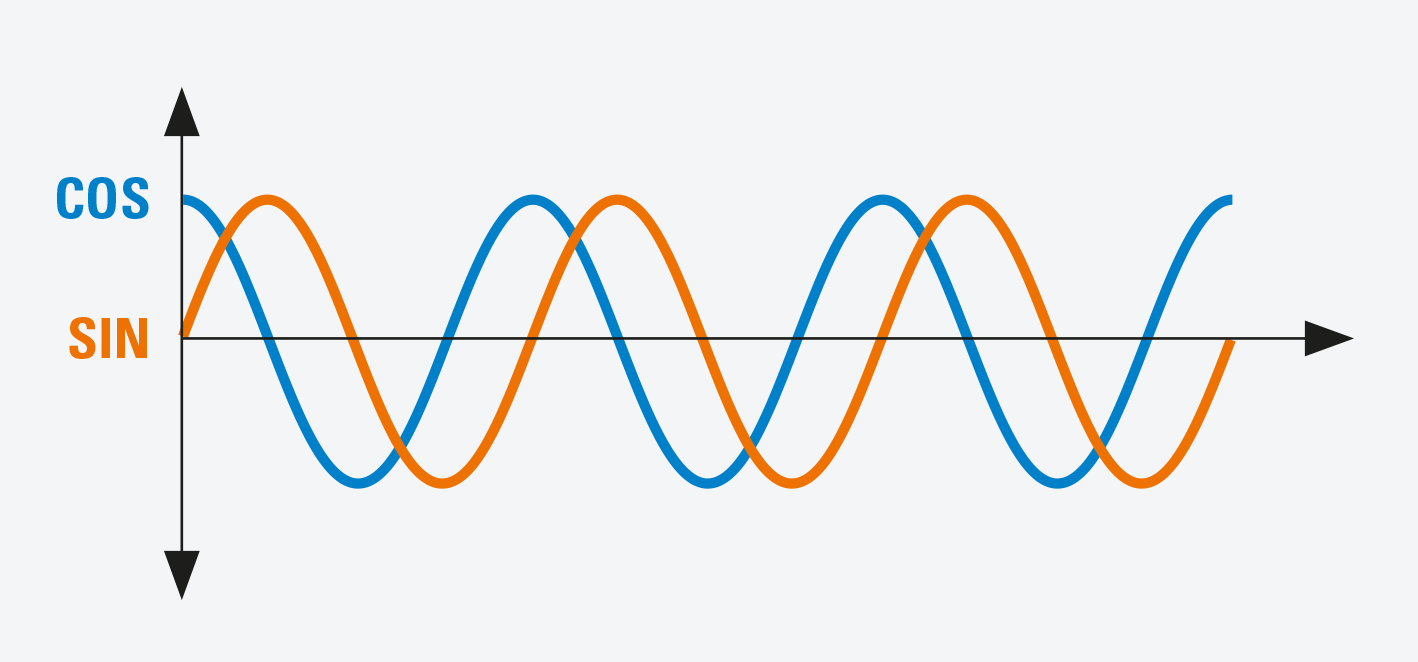
Magnetische Sensorik mit Magnetring – Funktionsweise
Der Magnetring ist mit der Applikationswelle verbunden. Der Sensorbaustein erfasst 2 Signalperioden, die um 1/4 der Pollänge versetzt sind, als Eingangssignal A und B. Daraus resultieren 2 elektrische Spannungen als Sinus- und Cosinus Signale, die je nach programmierter Impulszahl in Rechtecksignale gewandelt werden.
Ein optionales Referenzsignal (1x pro Umdrehung) kann zur Ermittlung von Winkelpositionen herangezogen werden.
