 Z powodu problemu technicznego nasza strona jest dostępna tylko w ograniczonym zakresie. Dotyczy to również naszego obszaru usług pobierania. Pracujemy już nad rozwiązaniem i prosimy o wyrozumiałość.
Z powodu problemu technicznego nasza strona jest dostępna tylko w ograniczonym zakresie. Dotyczy to również naszego obszaru usług pobierania. Pracujemy już nad rozwiązaniem i prosimy o wyrozumiałość.Zintegrowany magnetyczny enkoder obrotowy z pierścieniem magnetycznym
Elastyczne, oszczędzające miejsce i bezobsługowe rozwiązanie do precyzyjnego pomiaru kąta i pozycji w kompaktowych systemach napędowych.
Zintegrowane enkodery magnetyczne firmy Kübler niezawodnie wykrywają zmianę pola magnetycznego z bieguna północnego i południowego na pierścieniu, który jest połączony z wałem napędowym. Dzięki elastycznemu doborowi rozdzielczości i geometrii pierścienia magnetycznego czujniki można optymalnie dostosować do różnych napędów i wymagań. Oferują one bezobsługowe, zajmujące niewiele miejsca rozwiązanie dla kompaktowych silników i zapewniają precyzyjny pomiar kąta i położenia, nawet w wymagających warunkach przemysłowych
Zintegrowany magnetyczny enkoder obrotowy z pierścieniem magnetycznym
Elastyczne, oszczędzające miejsce i bezobsługowe rozwiązanie do precyzyjnego pomiaru kąta i pozycji w kompaktowych systemach napędowych.
Zintegrowane enkodery magnetyczne firmy Kübler niezawodnie wykrywają zmianę pola magnetycznego z bieguna północnego i południowego na pierścieniu, który jest połączony z wałem napędowym. Dzięki elastycznemu doborowi rozdzielczości i geometrii pierścienia magnetycznego czujniki można optymalnie dostosować do różnych napędów i wymagań. Oferują one bezobsługowe, zajmujące niewiele miejsca rozwiązanie dla kompaktowych silników i zapewniają precyzyjny pomiar kąta i położenia, nawet w wymagających warunkach przemysłowych
Zalety
ELASTYCZNY
PROGRAMOWALNY
ROBUST
SZYBKO
Wykrywanie magnetyczne za pomocą pierścienia magnetycznego – konstrukcja
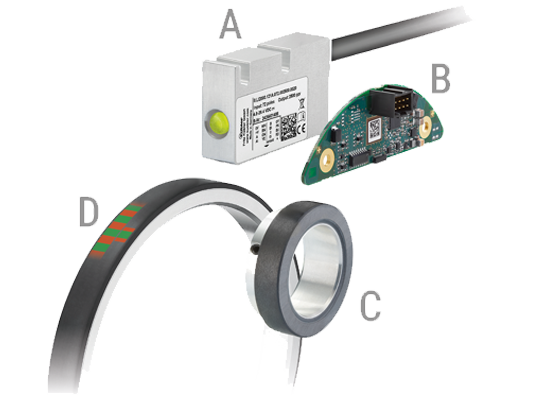
A. Technologia czujników w obudowie IP67 do użytku nawet w niechronionych obszarach
B. Płytka czujnika do bezpośredniej integracji z napędem - kształt i wymiary można dostosować
C. Pierścienie magnetyczne dla różnych średnic wału i typów montażu
D. Długość biegunów pierścieni magnetycznych 2 mm lub 5 mm - opcjonalnie z sygnałem odniesienia
Warianty głowic czujników

Kompletne systemy składające się z głowicy czujnika i pierścienia magnetycznego
- Wytrzymała obudowa głowicy czujnika o stopniu ochrony IP67 do
integracji lub dołączenia do aplikacji - Prosta instalacja

W pełni integrowalne rozwiązanie dla płytek drukowanych
- Możliwość indywidualnego dostosowania
- Minimalne zapotrzebowanie na miejsce
Elastyczny wybór długości drążka i pierścieni magnetycznych

Dla wysokiej jakości sygnału
Jeśli stawiane są wysokie wymagania dotyczące jakości sygnału, należy zastosować bezłożyskowe enkodery obrotowe RIM200 z biegunami o długości 2 mm lub programowalne bezłożyskowe enkodery obrotowe RIM2000. Wymaga to dobrych łożysk i stabilnego procesu instalacji, który pozwala na szczelinę powietrzną do 1 mm.

Dla aplikacji z większą szczeliną powietrzną
Jeśli aplikacja wymaga większej szczeliny powietrznej (do maks. 2 mm), stosuje się bezłożyskowe enkodery obrotowe RIM500 o długości bieguna 5 mm lub programowalne bezłożyskowe enkodery obrotowe RIM5000. Oferują one również wysoką wydajność i wysoką jakość sygnału.

Szeroki wybór pierścieni magnetycznych
Nawet jeśli wysoką rozdzielczość można uzyskać dla wszystkich średnic zewnętrznych, zaleca się wybranie największej możliwej średnicy.

Różne opcje montażu
Dostępne są różne średnice i typy mocowań do montażu na wale aplikacji.
Czujniki magnetyczne z pierścieniem magnetycznym - jak działają?
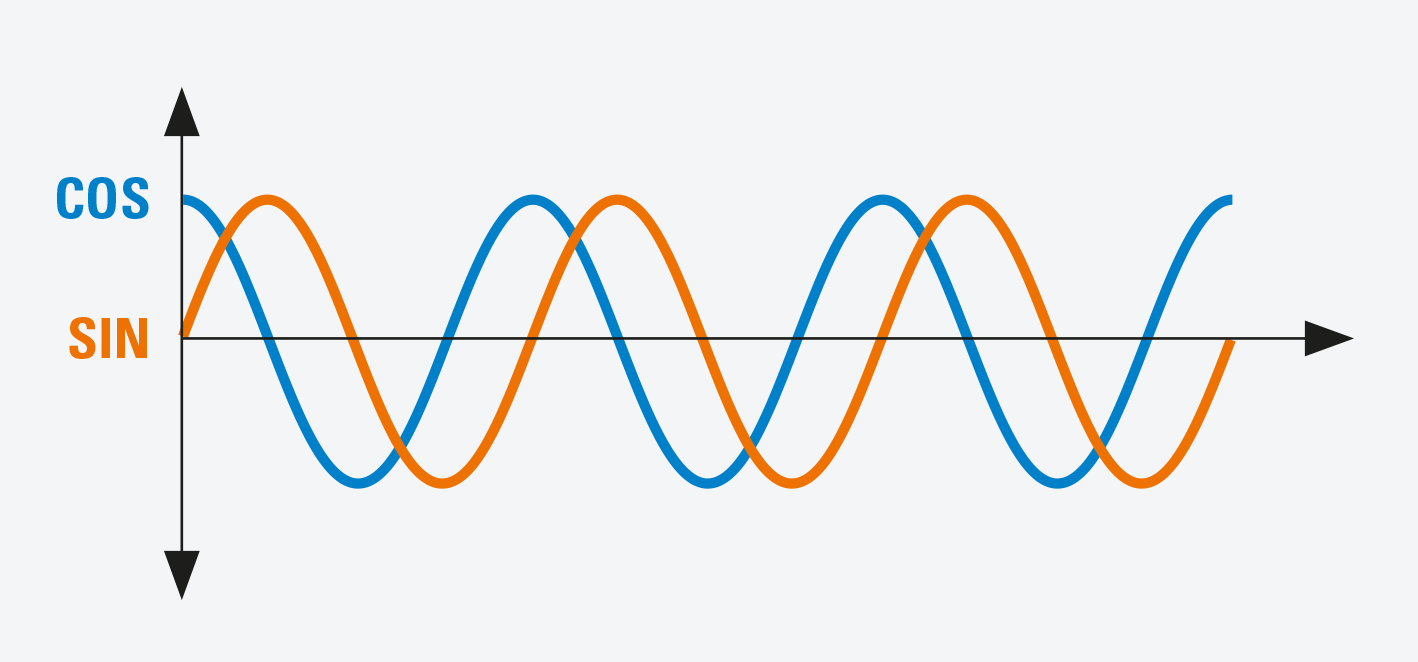
Pierścień magnetyczny jest połączony z wałem aplikacji. Moduł czujnika rejestruje 2 okresy sygnału, które są przesunięte o 1/4 długości bieguna, jako sygnały wejściowe A i B. Skutkuje to 2 napięciami elektrycznymi jako sygnałami sinusoidalnym i cosinusoidalnym, które są przekształcane w sygnały fali prostokątnej w zależności od zaprogramowanej liczby impulsów.
Opcjonalny sygnał referencyjny (1x na obrót) może być użyty do określenia pozycji kątowych.
