 Z powodu problemu technicznego nasza strona jest dostępna tylko w ograniczonym zakresie. Dotyczy to również naszego obszaru usług pobierania. Pracujemy już nad rozwiązaniem i prosimy o wyrozumiałość.
Z powodu problemu technicznego nasza strona jest dostępna tylko w ograniczonym zakresie. Dotyczy to również naszego obszaru usług pobierania. Pracujemy już nad rozwiązaniem i prosimy o wyrozumiałość.Zintegrowane magnetyczne enkodery końca wału dla silników
Oszczędzające miejsce i bezobsługowe rozwiązanie do precyzyjnego pomiaru kąta i pozycji w kompaktowych systemach napędowych
Zintegrowane magnetyczne enkodery końca wału firmy Kübler wykrywają kąty obrotu bezpośrednio na końcu wału. Do określenia pozycji wykorzystywana jest przestrzenna zmiana pola magnetycznego spowodowana obrotem namagnesowanego diametralnie magnesu cylindrycznego. Technologia ta pozwala na oszczędność miejsca, bezobsługowe rozwiązanie dla kompaktowych napędów silnikowych, które można łatwo zintegrować.
Zintegrowane magnetyczne enkodery końca wału dla silników
Oszczędzające miejsce i bezobsługowe rozwiązanie do precyzyjnego pomiaru kąta i pozycji w kompaktowych systemach napędowych
Zintegrowane magnetyczne enkodery końca wału firmy Kübler wykrywają kąty obrotu bezpośrednio na końcu wału. Do określenia pozycji wykorzystywana jest przestrzenna zmiana pola magnetycznego spowodowana obrotem namagnesowanego diametralnie magnesu cylindrycznego. Technologia ta pozwala na oszczędność miejsca, bezobsługowe rozwiązanie dla kompaktowych napędów silnikowych, które można łatwo zintegrować.
Zalety magnetycznych enkoderów na końcu wału
ROBUST
PROSTY
PRECYZJA
ELASTYCZNY
Zintegrowane rozwiązania enkodera z magnesem diametralnym – budowa

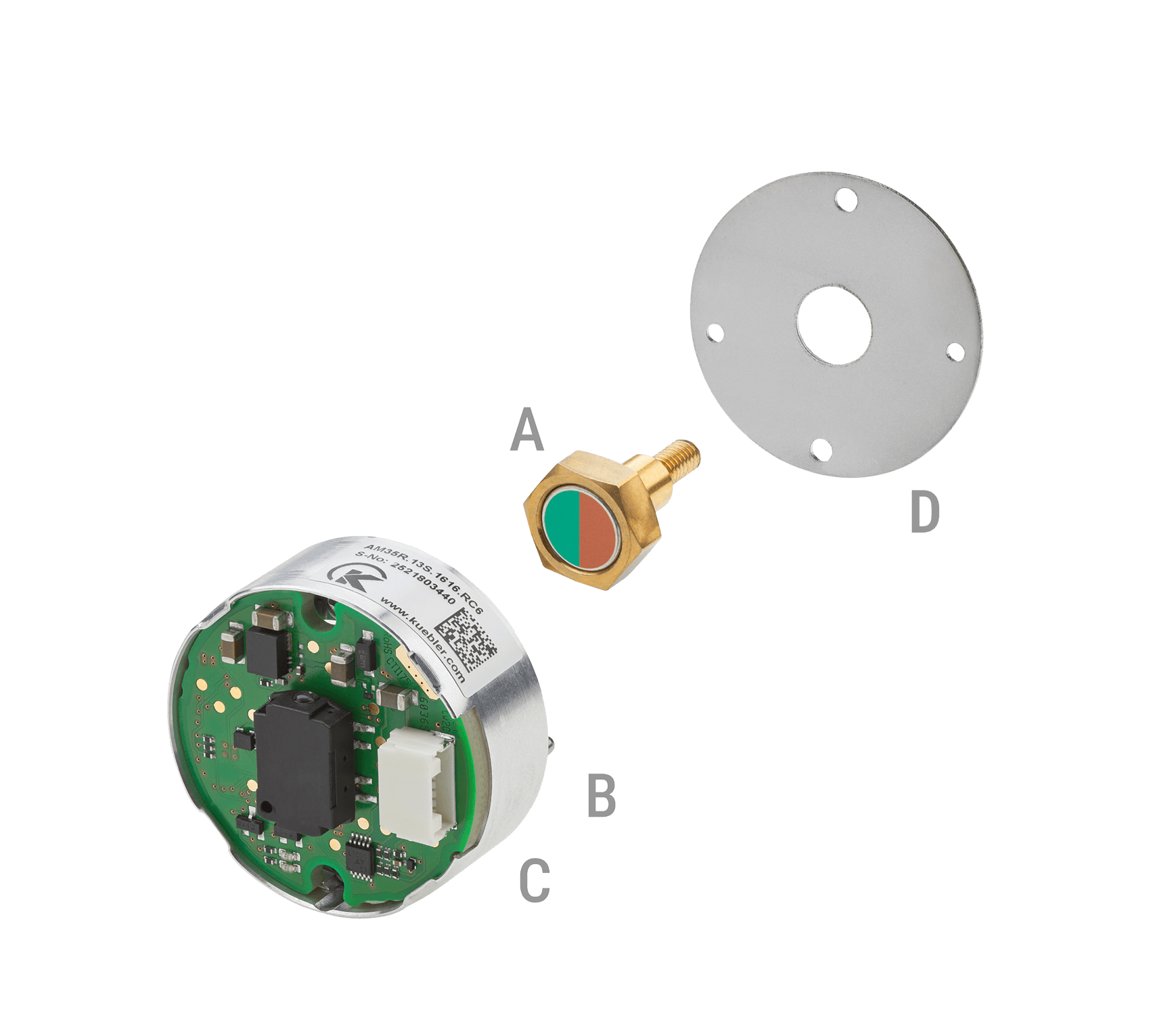
- Średnicowo namagnesowany magnes cylindryczny do montażu na wale klienta
- Czujniki pola magnetycznego z cyfrowym przetwarzaniem sygnału
- Technologia zbierania energii do wykrywania wielu przetworników
- Płyta ekranująca do ochrony przed magnetycznymi polami zakłócającymi z silnika
(np. hamulec elektromagnetyczny)
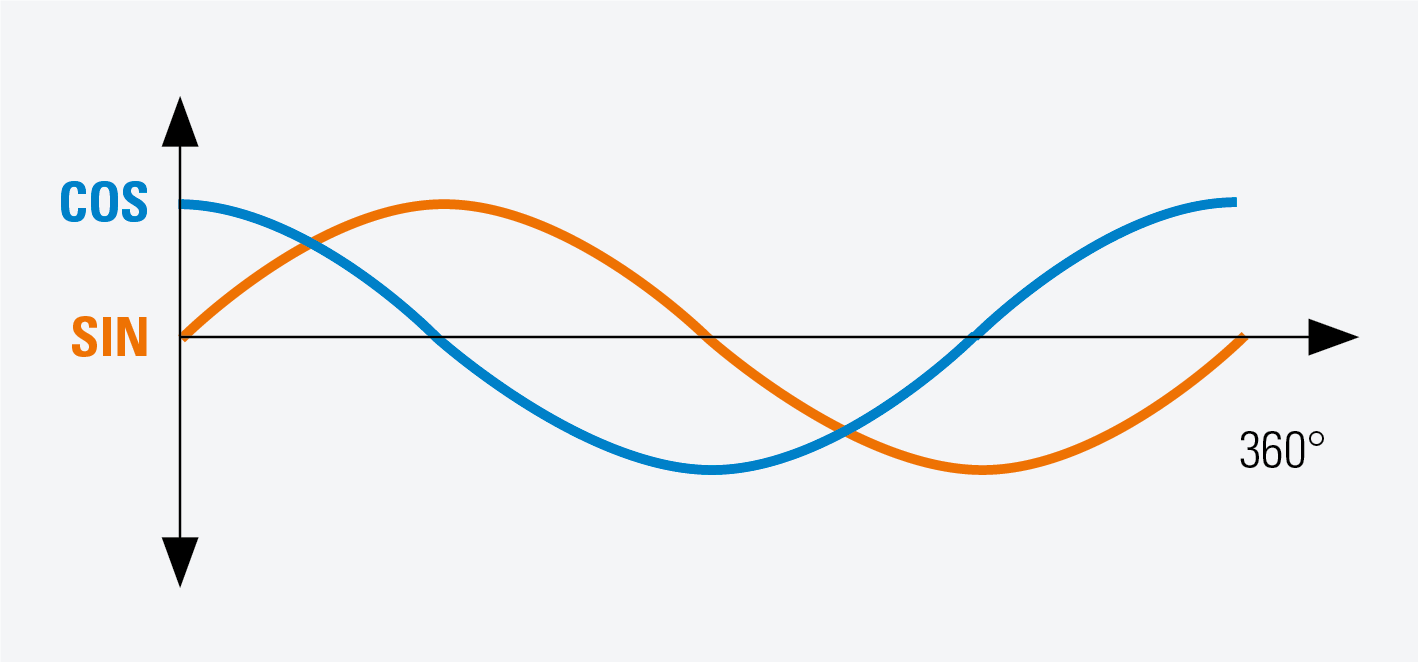
Czujniki magnetyczne z namagnesowanym diametralnie magnesem cylindrycznym
Gdy magnes obraca się wraz z wałem, pole magnetyczne zmienia się w płaszczyźnie kierunku obrotu. Czujniki wykrywają zmiany pola magnetycznego i przekształcają je w sygnały sinusoidalne i cosinusoidalne.
Dokładna pozycja obrotowa (kąt) jest obliczana na podstawie tych sygnałów z rozdzielczością kilku tysięcy kroków na obrót. Opcjonalnie, czujnik zbierający energię może nadal rejestrować liczbę obrotów, nawet jeśli zasilanie zostanie przerwane.
